|
|
|
|
|
|
|
|
|
С.П. Королёв МВТУ ИМ. БАУМАНА 1949
|

Вторая, основная, часть курса лекций, прочитанного С. П. Королевым в 1949 г. на Высших инженерных курсах, организованных при Московском высшем техническом училище им. Н. Э. Баумана для переподготовки инженеров различных специальностей для работы в ракетостроительной промышленности. Этот курс, в котором был использован и обобщен опыт работы ОКБ по созданию ракет, сразу же изданный в МВТУ в качестве учебного пособия, явился первым в мире систематизированным, достаточно подробным и завершенным курсом основ проектирования жидкостных БРДД, и поэтому он лег в основу преподавания этой дисциплины в институтах, готовящих специалистов по ракетостроению. В настоящем сборнике* работа печатается по изданию МВТУ, 1949 г. [* Имеется ввиду сборник «Творческое наследие академика Сергея Павловича Королева. Избранные труды и документы» / Под общей редакцией академика М. В. Келдыша — Издательство «Наука», 1980 г.]
|
 |
(1) |
К уравнению (1) мы добавляем два уравнения:
 |
(2) |
Уравнения (1) и (2) необходимо дополнить уравнением программы, обеспечивающей заданную форму траектории и нужный угол θ в конце активного участка.
Зависимость θ=θпр(t) задается графически или в виде таблицы.
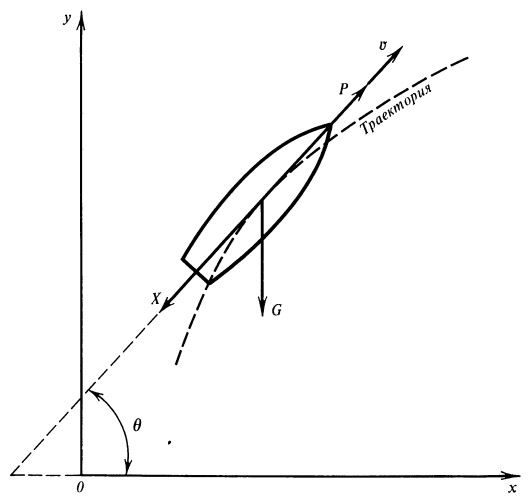 Рис. 1. К выводу уравнений движения |
Расчеты по упрощенной схеме, представленной уравнениями (1) и (2), достаточны для проверки основных проектных характеристик.
В уравнение (1) входят величины Р, X и m, о которых кратко можно сказать следующее.
Тяга Р при полете ракеты может определяться по формуле
| (3) |
где Р0 — тяга, замеренная на стенде Рст, с учетом силы сопротивления неотклоненных газовых рулей Хгаз:
![]()
Сопротивление неотклоненных газовых рулей ракеты 2ПБ составляет в среднем 1400—1800 кг.
В случае отклонения газовых рулей их сопротивление может резко увеличиваться. Однако при этом необходимо иметь в виду также и то обстоятельство, что геометрия газовых рулей по мере работы двигателя сильно изменяется вследствие их постепенного обгорания.
Поэтому вопрос о величине дополнительного сопротивления пока не может быть решен достаточно точно, и во всех расчетах можно ориентироваться на приведенные цифры.
Sa означает площадь выходного сечения сопла, р0 — атмосферное давление у поверхности Земли, р — давление в атмосфере на данной высоте.
Масса ракеты может определяться по формуле
| (4) |
где m — масса ракеты в момент t, m0 — масса ракеты в момент t=0, ṁ — секундный массовый расход топлива, t — время в секундах.
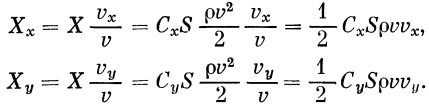
Сила лобового сопротивления ракеты определяется по формуле
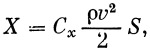 |
(5) |
где Сх — коэффициент силы лобового сопротивления, ρ — плотность воздуха на высоте полета ((кг/м4)•сек2), v — скорость полета (м/сек), S — площадь миделя ракеты (м2).
Все численные значения основных величин, а также интегрирование системы уравнений (1) и (2) нами здесь не рассматриваются, так как вопросу численного интегрирования указанных уравнений будет посвящено специальное практическое занятие.
* * *
Пассивный, или свободный, участок полета ракеты, т. е. движение ее после окончания работы двигателя, является движением по инерции. Живая сила, приобретенная ракетой на активном участке, расходуется на преодоление сопротивления воздуха и силы тяготения.
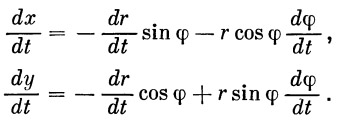
Мы разбиваем расчет свободного участка на две части. В первой части учитываем действие сопротивления воздуха и поля тяготения, а во второй — ограничиваемся учетом лишь поля тяготения. Система координат и обозначения, принимаемые нами при расчете первого участка свободного полета, поясняются на рис.
2. Если обозначить индексами х и у проекции соответствующих векторов на оси координат, то уравнения движения центра тяжести ракеты примут вид
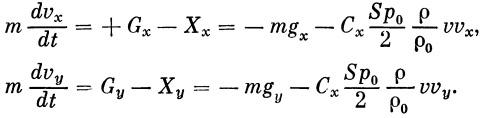 |
(6) |
При этом

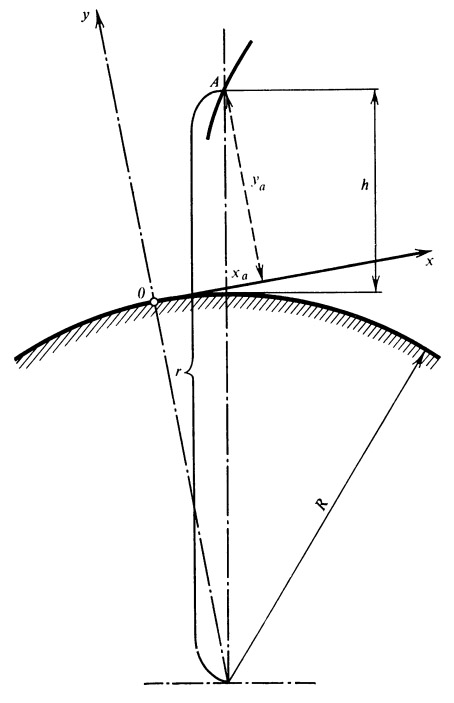 Рис. 2. Система координат и основные обозначения для первого участка свободного полета |
ибо

Значения Хх и Ху получаются [в виде]
Разделив уравнения (6) на m и добавляя два кинематических уравнения, получим систему уравнений (7), достаточную для проведения численного интегрирования и определения параметров интересующего нас участка:
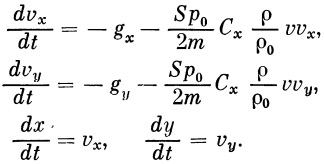 |
(7) |
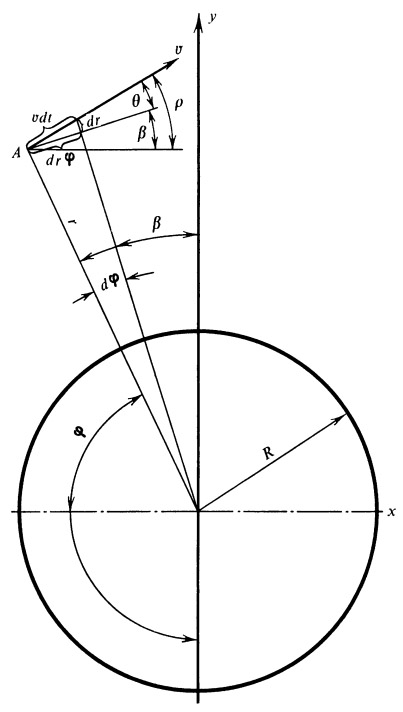 Рис. 8. Система координат и основные обозначения для второго участка свободного полета |
Высота h в случае необходимости может быть определена по формуле
 |
(8) |
В результате численного интегрирования системы уравнений (7) мы получаем координаты центра тяжести ракеты, ее скорость, а также угол наклона касательной к траектории для момента времени, после которого силой сопротивления воздуха можно пренебречь.
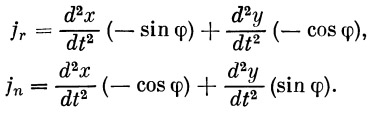
Эти параметры будут начальными условиями для расчета второй части свободного участка, где учитываем только силы тяготения. К расчету этого участка мы и перейдем. Принятые обозначения поясняются рис. 3.
Для движущейся точки А могут быть написаны следующие соотношения:
| (9) |
Дифференцируя, получим
Дифференцируя еще один раз, имеем

Обозначим: jr — ускорение ракеты по направлению радиус-вектора; jn — ускорение ракеты по нормали к радиус-вектору. Очевидно, что
После подстановки в эти уравнения значений d2x/dt2 и d2y/dt2 и соответствующих преобразований, получим
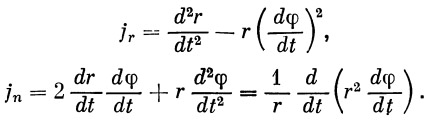 |
(10) |
Напишем уравнение движения нашей ракеты в полярной системе координат (r, φ). Учитывая, что
| (11) |
где g — ускорение на высоте полета ракеты, и подставляя в уравнения (10) значения jr и jn из уравнений (10), получим
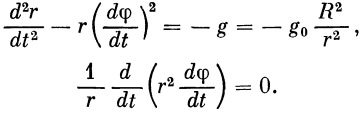 |
(12) |
Из последнего уравнения следует известный закон Кеплера
 |
(13) |
Из уравнения (13) мы найдем dφ/dt и, подставляя его в первое уравнение системы (12), получим
Умножим обе части последнего уравнения на 2 (dφ/dt):

откуда
 |
(14) |
Интегрируем уравнение (14):
 |
(15) |
откуда

Поэтому
 |
(16) |
Из уравнения (13) имеем
Подставляем сюда выражение для dt из (16):
 |
(17) |
Для интегрирования уравнения (17) введем подстановку
 |
(18) |
Тогда
Теперь вместо дифференциального уравнения (17) мы можем написать следующее:
откуда
| (19) |
или
![]()
Из выражения (18) находим значение радиуса r:
  |
(20) |
Выбирая соответствующим образом начало отсчета угла φ, из последней формулы можно получить
 |
(21) |
Если обозначить
 |
(22) |
 |
(23) |
то из (21) следует
 |
(24) |
Это уравнение представляет собой уравнение эллипса. Так как ось у проходит через вершину траектории, то введем в качестве координатного (полярного) угла угол β вместо угла φ:
![]()
тогда
 |
(25) |
при β=0
| (25') |
Определим постоянные величины, введенные в процессе интегрирования.
У нас имеются две произвольные постоянные C1 и С2 и два сокращенных обозначения р и ε.
Если момент начала свободного участка ракеты в поле тяготения (без учета сил сопротивления воздуха) совместить с моментом конца сгорания топлива, то тогда параметры точки конца горения будут одновременно начальными условиями для свободного участка.
Пусть ракета в начале свободного участка находилась в точке А (см. рис. 3). Всем величинам, характеризующим положение и скорость ракеты в этот момент, мы присваиваем индекс «нуль». Тогда из рис. 3 легко устанавливаем, что
Сопоставляя с уравнением (13), получим
 |
(26) |
Далее, из уравнения (15) имеем
или
 |
(27) |
Величина (dr/dt)0 определяется из рис. 3:
![]()
поэтому
а следовательно,
 |
(28) |
Константа С3 нами исключена из рассмотрения надлежащим выбором начала координат, что учитывается формулой (21).
Прежде чем выразить оставшиеся константы через известные величины, введем обозначение, чрезвычайно важное в дальнейших расчетах:
 |
(29) |
Здесь, как и выше, g0 означает ускорение на поверхности Земли, v0 и r0 — скорость ракеты и ее радиус-вектор в конце активного участка.
Согласно обозначению (22), находим
 |
(30) |
В соответствии с (23) получим
откуда
| (31) |
Далее, из выражения (25), решенного относительно β0,
Имеем
или
 |
(32) |
Переходя от cos β0 к tg β0 по формуле
 |
(33) |
и подставляя в формулу (33) выражение для cos β0 из (32), получим
 |
(34) |
Если равенством δ0=θ0+β0 ввести угол δ0, то формулы можно значительно упростить:

ИЛИ

откуда
 |
(35) |
Полученные формулы позволяют сразу решить все интересующие нас вопросы, связанные с расчетом свободного участка.
По известным начальным условиям (конец активного участка) вычисляется параметр v по формуле B9)
далее по формуле
находим угол δ0 и вычисляем β0:
![]()
По известному углу B0 определяем «эллиптическую» дальность lэл. Параметры движения в конце эллиптического участка (точка В) принимаются за исходные для расчета дальности нисходящего участка траектории lнисх. Обозначения поясняются рис. 4.
 Рис. 4. К расчету дальности полета |
«Эллиптическая» дальность вычисляется по следующей формуле:
| (36) |
Полная дальность ракеты вычисляется по формуле
| (37) |
Максимальная высота подъема, т. е. вершина траектории, определится выражением
| (38) |
(на основании формулы (25'))
или
 |
(39) |
На начальной стадии проектирования необходимость проведения серии подсчетов даже по таким сравнительно простым формулам все-таки связана с затратой значительного времени.
Поэтому для прикидочных расчетов может быть рекомендована простая номограмма, позволяющая с достаточным приближением и быстро производить такие расчеты.
Номограмма приведена на рис. 5.
При пользовании предложенной номограммой необходимо сделать следующее замечание.
Сравнение величин lакт+lнисх с величиной lполн показывает, что до дальностей
![]()
можно считать
![]()
 Рис. 5. Номограмма для расчета дальности 1 - v = l; 2 - 0,8; 3 - 0,7; 4 - 0,6; 5 - 0,5; 6 - 0,4; 7 - 0,2 |
Поэтому с достаточным приближением можем считать
| (40) |
Учитывая последнее обстоятельство, при определении основных проектных параметров мы можем пользоваться номограммой, построенной только для дальности эллиптического участка.
Рассмотрим некоторые задачи, решаемые с помощью номограммы.
1. Пусть нам задана величина v. Требуется определить возможную максимальную дальность. По номограмме при заданном v из условия оптимума находим β0 и θ0, затем по формуле (36) определяем lэл, по формуле (40) находим lполн.
2. Пусть задано lполн. Требуется определить оптимальные параметры. Зная lполн, по формуле (40) находим lэл, а по формуле (36) определяем β0
Далее используем номограмму: задаваясь найденным углом β0 определяем vmin и соответственно оптимальный угол θ0. По величине vmin находим минимально необходимую начальную скорость v0.
3. Задано θ0. Требуется определить v0, при которой этот угол имеет оптимальное значение.
Требование определения v0, удовлетворяющей поставленной задаче, аналогично отысканию такого v, при котором заданный угол дает максимальное значение дальности.
По номограмме легко видеть, что оптимальные условия можно найти не для любого угла θ, а только для θ0≤45°.
Следует подчеркнуть, что ценность номограммы заключается в получении первого ориентировочного подсчета основных величин лишь в начальной стадии проектирования.

|
|
|
|