|
|
|
|
|
|
|
|
||
Н.И. Игнатьев
© Н.И. Игнатьев, 2008,
«Наука и техника» 2008 №1
|






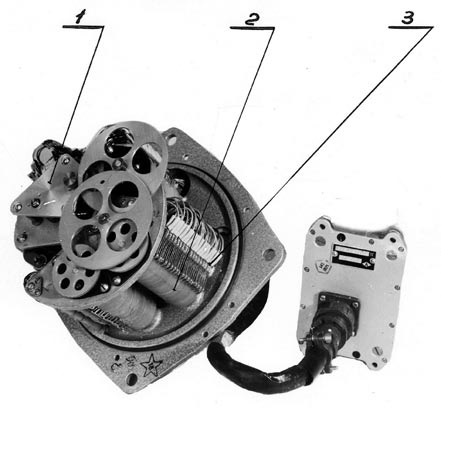
Николай Иванович Игнатьев окончил ХАИ в 1962 г., после чего 5 лет работал в авиапромышленности. В течение последующих 33 лет работал в КБЭ «Электроприборостроения» (ныне АО «Хартрон»), принимая участие в создании систем управления ракетно-космической техники. О ракетах и самолетах (особенно) рассказывать красиво и завлекательно относительно просто, так как «к авиации, вообще ко всяким летучим устройствам люди относятся с особенным интересом», и это, очевидно, потому, что «летательный аппарат красив наивысшей в технике красотой», потому что он всегда сплав граничных и запредельных способностей человека. Но может ли радовать глаз та «начинка», которая, максимально игнорируя внешние раздражители, с большой точностью ведет конкретный летательный аппарат до цели, «принуждает» его выполнять возложенную на него задачу, даже при отсутствии на борту человека? На этот вопрос ответить утвердительно вряд ли возможно. Если говорить о современной баллистической ракете (БР), то ее система управления (СУ), выполняющая задачу осуществления полета по заданной программе, – это сложный комплекс взаимодействующих приборов и исполнительных органов. Ее приборы – это некоторое количество угловатых, невзрачных на вид ребристых «коробков», заключающих в себе «мозг» ракеты. Он не подчиняется эмоциям, не реагирует на внешние раздражители, ведет ракету к цели по расчетной, программной траектории. Основное его назначение заключается в том, чтобы «указать» ракете нужную скорость под нужным углом наклона ее вектора к горизонту в нужной точке пространства с приемлемой точностью и в нужное время. Траектория полета может быть определена заранее и введена в программное устройство. Тогда не потребуется иметь на борту ракеты сложных вычислительных устройств, формирующих программу полета в соответствии с взаимным положением цели и ракеты и с учетом различных ожидаемых возмущений, действующих на нее. Но фактические условия полета ракеты отличаются от принятых при расчете траектории из-за воздействия на нее различных непредвиденных «возмущающих» факторов. Кроме того, трудно изготовить все ракеты одного типа одинаковыми по своим свойствам: массе, положению центра масс (ЦМ) и многому другому. Поэтому ракета без системы, способной корректировать ее полет, может легко «ошибиться» адресом. В ракетах могут применяться инерциальные, астроинерциальные системы, программные с использованием ориентиров, связанных с Землей, радионавигационные системы, а также системы управления с подачей команд по радиоканалу и системы самонаведения. Точность работы СУ во многом определяется точностью ее измерительных устройств. В их качестве могут быть использованы радиосредства или же акселерометры. При использовании радиосистемы наведения на борту ракеты находится только часть приборов, а другая их часть размещается на Земле. Передатчик радиоустройства, установленного на ракете, автоматически подает сигналы, по которым на пусковой позиции измеряется скорость ракеты. При достижении необходимой скорости радиостанция на наземной базе посылает в эфир соответствующий сигнал, и двигатели ракеты прекращают работу. Такая система управления зависит от аппаратуры, находящейся вне БР (обычно на Земле), то есть является неавтономной. Современные СУ БР, как правило, не используют внешнюю информацию (радиосигналы аппаратуры, расположенной вне ракеты, излучение небесных тел и т.п.), – весь комплекс приборов СУ размещается на борту ракеты. Ракета с такой системой управления не боится внешних помех, а ее пуск не зависит от времени суток и состояния атмосферы. Такие СУ являются (в основном) инерциальными, поскольку принцип работы измерительных устройств СУ основан на законе инерции (второй закон Ньютона). Свойство инерции тел используется для определения отклонений ракеты от заданной траектории полета, вызванных действием различных внешних сил. Основными элементами гиростабилизированных платформ (ГСП), позволяющими замерять угловые параметры летательного аппарата, являются гироскопы1. __________________ 1 Гироскоп – это массивный, сбалансированный маховик, вращающийся с большой угловой скоростью. СПРАВКА 1 С помощью трех гироскопов ракета обеспечивается инерциальной (невращающейся) системой координат, ориентированной в пространстве системой отсчета – создается основной командный прибор в инерциальных системах управления ракетой – Гиростабилизированная платформа (ГСП), угловое положение которой относительно заданных направлений в пространстве удерживается неизменным с высокой точностью или изменяется по заданной программе. Кажущаяся скорость измеряется бортовыми приборами – интеграторами линейных ускорений – или вычисляется по кажущемуся ускорению интегрированием. Если измерить ускорение ЦМ ракеты по трем направлениям: «вперед-назад», «вверх-вниз» и «вправо-влево», то можно вычислить и отклонение ее от заданной траектории во всех плоскостях. Три акселерометра, установленных на ГСП, и служат для этого. Значения ускорений в виде электрических напряжений с акселерометров идут на входы интеграторов. Информация на выходе каждого из них пропорциональна скорости. Если нужно вычислить и путь, пройденный ракетой, добавляется второй интегратор – интегратор скорости: информация с выхода этого интегратора пропорциональна пройденному пути. Очевидно, нужно иметь точные «часы», которые бы выдавали время в обработанном виде, например, в виде напряжения. Этот отсчет «времени» нужен для вычисления скорости ракеты и ее положения в пространстве. По-настоящему все началось с А-4, ракеты, в которой победители Германии увидели то, «чего не может быть!» Ракета после электрических проверок всех ее систем, после испытаний, имитирующих работу автоматики, уходила в полет из вертикального положения.
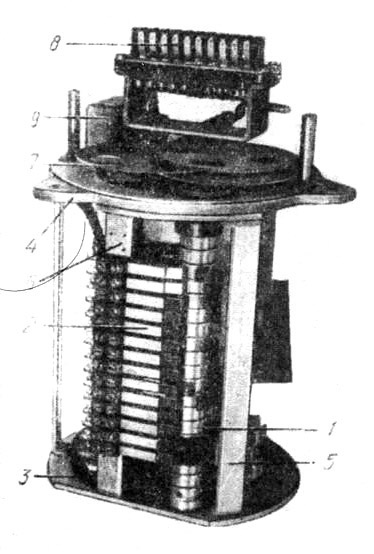
После отрыва ракеты от пускового стола срабатывал контакт подъема (КП), фиксируя начальный момент ее подъема. Сигнал от него являлся первой бортовой командой, по которой обесточивались электромагниты, удерживающие отрывные штекеры (электрические разъемы); включался в работу интегратор перегрузок; начинал действовать программный токораспределитель (ПТР), который предназначен для подачи управляющих команд в определенной временной последовательности группе приборов, находящихся на борту ракеты. Конструктивно ПТР представляет собой кулачковый валик, связанный через шестеренчатый редуктор с электродвигателем постоянного тока. При вращении валика кулачки замыкают контакты, что и дает начало соответствующим командам. Когда скорость ракеты становилась равной заданной, подавалась команда на прекращение работы двигателя. Далее ракета двигалась по баллистической траектории, подчиняясь законам движения свободно брошенного тела. Эта схема в общих чертах сохранялась для ракет первого поколения, до появления счетно-решающих приборов и БЦВМ. Заметим, что идея аналоговой системы управления ракеты А-4 на более совершенной элементной базе получила продолжение в ракетах 8К64 (Р-16), 8К63 (11К63), 8К67. К тому времени вошли в жизнь магнитные усилители, шаговые двигатели, полупроводниковые приборы, сильноточные дистанционные переключатели и слаботочные реле.
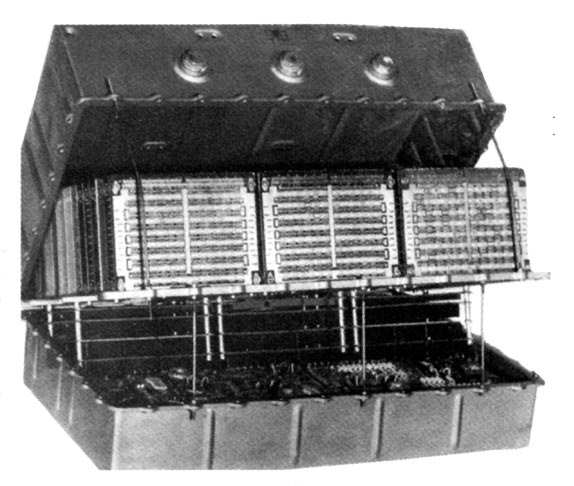
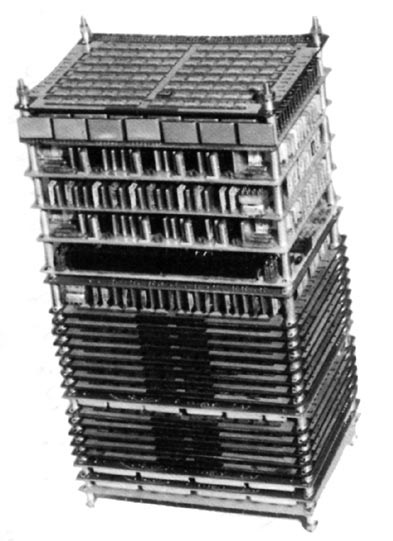
Толчок дальнейшему развитию ракетной техники дало рождение атомной бомбы. Чтобы она стала оружием, ей требовалось соединение ракетной техники, радиолокации, автоматики, приборостроения. Потребовались электронные машины для вычислений и управления. Автономные СУ первых баллистических ракет не удовлетворяли требованиям точности. В связи с этим в их состав вводились радиосистемы. Наземные станции этих систем на основании данных траекторных измерений при полете ракеты формировали и передавали на борт в виде аналоговых сигналов команды на снижение тяги и выключение двигателей последних ступеней, добиваясь таким образом приемлемой точности стрельбы. Поступала входная информация и для автомата стабилизации, входящего в состав автономной системы управления. Первой радиосистемой такого рода стала система боковой радиокоррекции (БРК-1) разработки НИИ-885 для ракеты Р-2 конструкции ОКБ С. Королева. Проще говоря, БРК представляла собой радиомаяк, равносигнальная зона которого совмещалась с плоскостью прицеливания (с плоскостью стрельбы). В 1953 году в стенах того же института была разработана система радиоуправления (РУП-62) для ракеты с дальностью около 1200 километров. С ее помощью определялась реальная скорость ракеты и расстояние до нее, по этим данным назначался момент выдачи команд на выключение двигателя ракеты. После чего система измеряла параметры пассивного участка траектории полета и прогнозировала точку падения головной части. Но наличие подобных связей с Землей делает ракету уязвимой от влияния извне. Когда весной 1951 года Днепропетровский автомобильный завод вместо грузовиков приступил к производству первых отечественных баллистических ракет Р-1, Р-2 и Р-5 разработки «фирмы» Сергея Королева, освоение бортовой и наземной аппаратуры СУ ракеты Р-1 было поручено Харьковскому заводу «Электроинструмент». Заводу присвоили наименование «Харьковский союзный завод №897 МПСС, предприятие почтовый ящик 201» (с 1966 года ему дано открытое название «Коммунар»). И вскоре завод выпустил первую партию бортовых приборов ракеты Р-1 (8А11): «Коммунар» стал для Харькова началом приобщения к ракетной технике. Вторым серийным заводом по производству аппаратуры был определен (тоже харьковский) завод имени Т.Г. Шевченко («Предприятие п/я 409»). Сопровождение серийного производства систем бортовой радиокоррекции баллистических ракет средней дальности было основной задачей Специального конструкторского бюро (СКБ) завода. Новую страницу в истории отечественной ракетной техники открыла баллистическая ракета средней дальности на так называемых высококипящих компонентах топлива, создание которой было узаконено Постановлением ЦК КПСС и Совета Министров СССР от 13 августа 1955 года. Переход на новые компоненты потребовал решения целого ряда проблем, связанных со стойкостью конструкционных материалов к агрессивным средам и сохранением стабильности компонентов топлива при длительном нахождении их в баках ракеты. Р-12, хоть и на новой основе, как бы повторяла ракету Королева Р-5. Но она обладала преимуществом – не надо было рядом с боевой позицией размещать целые заводы по производству жидкого кислорода. Это было начало принципиально другого направления в развитии БРК, которое привело к созданию баллистической ракеты, пригодной для массового применения в войсках. Ради справедливости следует сказать, что идея такой ракеты родилась в стенах НИИ-88, но воплощение ее в жизнь в виде одноступенчатой ракеты с несущими топливными баками, отделяемой в полете головной частью и автономной инерциальной системой управления заслуженно и бесспорно принадлежит коллективу завода №586. Инерциальная система управления разрабатывалась в московском НИИ-885. В 1958 году к освоению и производству бортовых приборов СУ и наземного пуско-проверочного оборудования ракеты Р-12 по документации СКБ завода №867 подключился «Киевский радиозавод» (КРЗ). Но вскоре наметилось отставание ракеты Р-12 к летно-конструкторским испытаниям (ЛКИ). Причин было много, а «затягивание» готовности системы управления определялось огромной загрузкой НИИ-885, коллектив которого трудился над разработкой подобных систем для всей ракетно-космической отрасли страны. На фоне этих трудностей главному конструктору ОКБ-586 Янгелю удалось убедить «верхи», что ему нужна «своя контора». И в результате 11 апреля 1959 года ЦК КПСС и Совет Министров СССР приняли Постановление №390-182 о создании Особого конструкторского бюро №692 (ОКБ-692 – секретное обозначение, для открытой переписки – «Организация абонентный ящик 67» (а/я 67), с июля 1966 года – п/я А-7160 (КБЭ) МОМ) с опытным заводом для разработки и изготовления приборов систем управления ракетных комплексов М.К. Янгеля. Местом дислокации а/я 67 выбрали Харьков. Для размещения нового ОКБ решили использовать здания и сооружения Харьковского военного училища МВД СССР. Создавалось очень секретное ОКБ-692, оставшееся в памяти жителей города Харькова как «Шестьдесят седьмой почтовый ящик», на базе серийного конструкторского бюро (СКБ) при Харьковском союзном заводе №897 и СКБ-285 (при заводе им. Т.Г. Шевченко). Первым руководителем нового ОКБ и начальником предприятия был назначен доктор технических наук Борис Михайлович Коноплев – человек сложной и необычной судьбы: он еще в 1937 году, не имея диплома радиоинженера, был весьма авторитетным радиоспециалистом. Во время войны работал по организации радиосвязи на маршрутах северных морских конвоев. В 1947 году его «захватила» ракетная техника. В начале 1950 года Коноплев возглавил в НИИ-885 все радиотехническое направление. Тогда он был горячим сторонником комбинированных систем управления, то есть сочетания автономной инерциальной и корректирующей ее ошибки радиосистемы. Но, став во главе молодого ОКБ, он оценил значение автономных СУ. Перед ОКБ-692 была поставлена огромной важности задача – разработка в кратчайшие сроки СУ МБР Р-16 (8К64) с обеспечением ее длительного боевого дежурства (БД) в заправленном состоянии. А в ракете многое было впервые. Окончательно было признано принять к реализации идею чисто инерциальной СУ. Сложность выполнения задания усугублялась тем, что создание научного и производственного центра проходило в совершенно неприспособленных для этого помещениях. Достаточно сказать, что сборочный цех ОКБ размещался в фойе бывшего клуба училища. Хрущев, выступая после возвращения из Нью-Йорка на митинге в Москве 20 октября 1960 года, грозился показать «господам» «Кузькину мать». Ракета-носитель для нее в эти дни срочно готовилась к испытательному полету. СПРАВКА 2 13 мая 1959 года Постановлением ЦК КПСС и Совета Министров СССР конструкторскому бюро «Южное» (тогда еще ОКБ-586, предприятие п/я 203) была поручена разработка межконтинентальной баллистической ракеты (МБР) на так называемых высококипящих компонентах топлива. И ответом на американский вызов ракетой «Титан-1» стала Р-16 (8К64), SS-7, Sadler. Длина ракеты 31 м. Диаметр корпуса 3,0 м. Стартовый вес 140 тонн. Дальность полета в пределах от 11000 до 13000 км. Ракета была выполнена по схеме с поперечным делением ступеней. Первая ступень состояла из переходника, к которому крепилась вторая ступень, бака окислителя, приборного отсека, бака горючего и хвостового отсека с силовым кольцом. Топливные баки несущей конструкции. Для обеспечения устойчивого режима работы ЖРД баки имели наддув: бак окислителя в полете встречным потоком воздуха, бак горючего сжатым воздухом из шаровых баллонов, размещенных на борту ракеты. Двигательная установка состояла из маршевого и рулевого двигателей. Маршевый двигатель имел суммарную тягу на земле 227 тонн. Рулевой двигатель имел четыре поворотные камеры сгорания и развивал тягу на земле 29 тонн. Система подачи топлива – турбонасосная с питанием турбин продуктами сгорания основного топлива. Вторая ступень служила для разгона головной части (ГЧ) до скорости, обеспечивающей заданную дальность, имела аналогичную конструкцию, но была короче и меньшего диаметра. Ее двигательная установка (ДУ) во многом была заимствована от первой ступени. Маршевый двигатель развивал тягу 90 тонн (в пустоте). Рулевой двигатель отличался меньшими размерами и тягой (5 т). Все двигатели ракеты работали на самовоспламеняющихся (при контакте) компонентах топлива: окислитель АК-27И, горючее – несимметричный диметилгидразин (НДМГ), которым было дано условное название – «амил» и «гептил». Впервые в отечественной практике для этой ракеты была предложена инерциальная автономная СУ. В качестве чувствительного элемента СУ впервые на советских межконтинентальных ракетах применена ГСП с установленными на ней в плоскости стрельбы гироинтеграторами. Программные функции на борту выполняли магнитофон (носителем информации была специальная проволока) и ПТР. В СУ ракеты входили автоматы угловой стабилизации, стабилизации центра масс, система регулирования кажущейся скорости, система одновременного опорожнения баков, автомат управления дальностью. Приборы системы управления располагались в приборных отсеках на первой и второй ступенях. Квадратичное вероятное отклонение (КВО) при полете на максимальную дальность составило около 2700 м. Р-16 оснащалась отделяемой ГЧ двух типов, отличавшихся мощностью термоядерного заряда (3 Мт и 6 Мт). Как и все ракеты первого поколения, она не могла долго находиться с заправленными баками: в состоянии постоянной готовности хранилась в укрытиях или шахтах с пустыми баками. Пуск ракеты осуществлялся после ее установки на пусковой стол, заправки компонентами ракетного топлива и сжатыми газами, после проведения операций по прицеливанию. В высшей степени готовности Р-16 могла стартовать через 30 минут. По мере развития и улучшения тактико-технических характеристик ракет усложнялись задачи, решение которых возлагалось на системы управления, требования к точности росли, аналогово-релейные принципы построения аппаратуры исчерпали себя. Коллектив разработчиков ОКБ-692 пришел к выводу о необходимости применения в заказах специальной цифровой техники. В 1961 году начались работы по созданию цифровых систем с применением счетно-решающих приборов на феррит-транзисторных ячейках, положившие начало разработкам второго поколения систем управления. Вместо аналоговых усилителей и электромеханических ПТРов стали применяться функционально законченные модули на полупроводниковых элементах и запоминающие устройства на ферритовых сердечниках. Два акселерометра со своими интеграторами показывали, насколько ракета отклонилась в полете в бок и по высоте. Третий акселерометр давал информацию о скорости ракеты и пройденном ею пути. Информация поступала в счетно-решающие приборы (СРП). В них перед пуском на Земле закладывалась расчетная информация о скорости и расстоянии, которые БР должна иметь в определенные моменты времени. СРП сравнивали замеренную и расчетную информации, переводили измерения в координаты траектории и выдавали «сигнал ошибки», который через исполнительные органы подправлял траекторию ракеты, приближая ее к расчетной (программной). Применение в системах управления счетно-решающих приборов вызвало необходимость развития производства многослойных печатных плат, модульного проектирования конструкций аппаратуры, разработки и освоения технологии изготовления оперативных и долговременных запоминающих устройств. В середине 60-х годов в течение ряда лет в Москве по Красной площади на военных парадах возили межконтинентальную баллистическую ракету 8К99. Точнее, видели всего лишь транспортно-пусковой контейнер ракеты, размещенный на ходовой части тяжелого танка. 8К99 была уникальной тем, что она хранилась и транспортировалась в контейнере, из которого она и уходила в полет при помощи так называемого «минометного» старта. Ракету из контейнера «выталкивал» пороховой аккумулятор давления, двигатели первой ступени запускались уже за пределами контейнера. Кроме несомненных достоинств, этот тип передвижного старта позволял существенно увеличить дальность полета ракеты. Система управления ракеты имела некоторые особенности – был применен моноблочный принцип компоновки бортовой аппаратуры (все бортовые приборы аппаратуры СУ, кроме ГСП, размещались в одном контейнере). На вооружение ракету не приняли. Однако идеи, заложенные при ее создании, были широко использованы при разработке новых ракетных комплексов. СУ 8К99 стала последней разработкой ОКБ-692 на старом теоретическом и технологическом фундаменте. После чего стало ясно, что принцип построения систем управления на основе аналоговых и дискретных счетнорешающих устройств не имеет перспективы. Дальнейшего совершенствования систем управления баллистических ракет потребовало увеличение объемов информации, обработка ее на борту ракеты в реальном масштабе времени. Последовало коренное изменение наземной аппаратуры.
Действительно революционным явилось использование в системах управления ракет бортовых цифровых вычислительных машин, обеспечивающих функционирование ракетного комплекса при наземных предстартовых проверках и в полете ракеты. Современные системы управления строятся на основе бортовой ЦВМ (БЦВМ). Находясь на борту, она решает задачи управления движением (в том числе ориентации и стабилизации), автономной и инерциальной навигации, программного управления и др., она может осуществлять контроль и проверку различных систем ракетного комплекса. Наличие бортовой цифровой вычислительной машины сделало возможным применение более совершенных законов управления, упрощение аппаратуры СУ и сокращение числа связей Земля-борт.
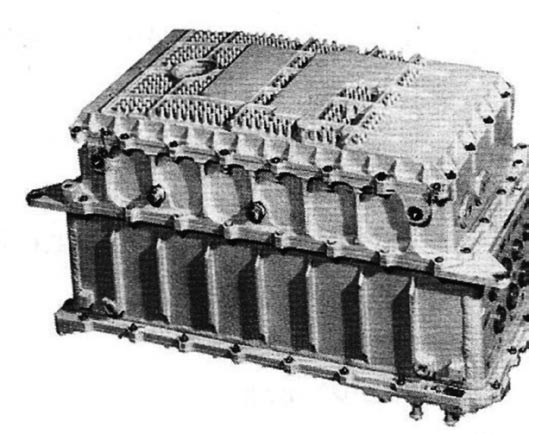
Когда стало ясно, что без нее не обойтись, специальными решениями правительства был утвержден план работ по созданию базовых БЦВМ и систем управления на их основе. Разработчиком ЦВМ «Аргон-11» такого назначения был определен НИИ цифровой электронно-вычислительной техники (НИИЦЭВТ) Министерства радиотехнической промышленности. К концу 60-х годов специалистам ОКБ-692 стало ясно, что разрабатывать бортовую цифровую вычислительную машину, наилучшим образом отвечающую конкретным требованиям, нужно собственными силами. Многие высказались за использование «своей» БЦВМ, поскольку в «чужую», да еще и предназначенную для целого ряда заказчиков машину вносить какие-либо коррекции в систему команд или что-либо другое будет сложно и чревато увеличением времени при создании систем. Проведенные исследования показали – технический уровень ОКБ-692 позволяет создать БЦВМ для систем управления ракет разработки ОКБ М. Янгеля. В 1965 году в одной из лабораторий ОКБ-692 была начата отработка методики проектирования БЦВМ, оценки взаимных связей и взаимовлияния входящих в нее блоков. В результате появился экспериментальный образец – одноканальная, одноадресная машина 1А100. Строилась она на модулях серии «Тропа-1». В 1968 году началась разработка штатной БЦВМ 1А200 в трехканальном варианте со съемными блоками ПЗУ (постоянное запоминающее устройство) с применением только что появившихся интегральных схем. На ее основе формировались системы управления МБР Р-36 (15А14) и УР-100Н (15А30) – в КБЭ опытно-конструкторские работы (ОКР) по этим системам имели шифр – заказ 274 и 34 соответственно. Блоки центрального процессора (ЦП) 1А200 и устройства ввода-вывода (УВВ) строились на интегральных микросхемах серии 106, блок оперативного запоминающего устройства (ОЗУ) был выполнен на ферритовых накопителях «Куб-1М», ПЗУ – на П-образных ферритовых сердечниках. Для электронных ОЗУ была разработана серия гибридных микросхем частного применения типа «Пенал», изготовление которых было передано заводам. 1А200 стала отправной для создания целой серии других, а через два года впервые в СССР был произведен успешный запуск ракеты нового для КБЮ (п/я В-2289) поколения 15А14. Появление БЦВМ в составе СУ повысило точность БР, снизило ошибки навигации путем учета собственных погрешностей ГСП, появилась возможность калибровки командных приборов без снятия ракеты с боевого дежурства, повысилась боеготовность, появилась возможность оперативного перенацеливания ракет. В конце 1971 года БЦВМ 1А200 была заменена на 15/1579 (быстродействие – 108000 операций в секунду, емкость ОЗУ – 16 килобайт, емкость ПЗУ – 28 килобайт).
БЦВМ 15Л579 была унифицирована для СУ ракет Р-36М и УР-100Н (SS-18 и SS-19). Удачно выбранные и реализованные ее характеристики позволили за короткое время путем минимальных изменений создать целый ряд систем управления с высокими техническими характеристиками. Комплекс мер по гарантированию надежности обеспечили этой БЦВМ уникальную длительность жизни – около 25 лет, а ее несколько модернизированный вариант находится на боевом дежурстве в российской армии и в настоящее время. Это результат работы многих коллективов прибористов, конструкторов, технологов, программистов, испытателей, рабочих и специалистов ОКБ-692, завода «Электроприбор», Киевского радиозавода, и Харьковского завода им. Т.Г. Шевченко. Применение ЦВМ в системе управления вызывало опасения головного предприятия за обеспечение успешного «минометного» старта ракеты, так как при сбое бортовой ЦВМ двухсоттонная ракета с неработающим двигателем могла упасть на стартовое сооружение. В целях безопасности специалистами ОКБ-692 была создана релейная система, которая дублировала команды БЦВМ. Но, к счастью, она не понадобилась. Впервые в СССР БЦВМ в составе СУ была использована при бросковых испытаниях ракеты Р-36М в середине 1972 года. Внедрение цифровых вычислительных машин вначале в бортовой, а затем и в стартовой аппаратуре положило начало созданию третьего поколения систем управ/гения для образцов ракетно-космической техники. Работы по БЦВМ дали толчок созданию интегральных микросхем (ИМС), вызвав технологический прорыв в области построения сложных цифровых систем. Новая элементная база «потянула» за собой совершенно новые технологические приемы, использование многослойных печатных плат, изготовление которых было связано с большим количеством сложных и трудоемких операций. Основные элементы БЦВМ (и других электронных приборов) стали создаваться с применением систем автоматизированного проектирования. Новые принципы построения систем потребовали кардинальных решений по повышению качества отработки и изготовления аппаратуры. В связи с этим была создана специальная технология отработки и испытаний систем управления на стендах математического, полунатурного и натурного моделирования. На завершающем этапе системы управления проходили цикл исследований на комплексных стендах, включающих в свой состав реальную аппаратуру или физические эквиваленты всех приборов, соединенных реальной кабельной сетью. Такая схема построения позволила проверить функционирование системы не только на всех штатных режимах, но и обеспечить отработку аппаратуры и программно-математического обеспечения при имитации различных нештатных ситуаций и «крайних» значениях параметров. Приказом №376 от 11.06.71 г. по предприятию п/я А-7160 (КБЭ) было объявлено об успешном выполнении обязательств по изготовлению ЦВМ 1А200М. Наступил этап электроники. Появление такой «начинки» в составе ракеты потребовало немало интеллектуальных усилий ее создателей. В последующие годы была разработана архитектура пяти поколений бортовых цифровых вычислительных машин. Особое место принадлежит системе динамической коррекции программ. Она обеспечила возможность оперативного внесения необходимых изменений в программное обеспечение бортовых цифровых вычислительных машин (без снятия для перепрошивки запоминающих устройств в заводских условиях) по каналам связи «Земля-борт» на всех этапах работ, включая испытания на старте и функционирование космического аппарата на орбите.
В течение 1975-1976 годов был разработан процессор М4М для цифровых вычислительных комплексов второго поколения. Надежность разрабатываемых систем была существенно улучшена за счет введения многоярусного мажоритирования. Когда появились первые интегральные микросхемы, электронная промышленность СССР отставала от американской примерно на 3-4 года. В дальнейшем это отставание только увеличивалось. Высокий уровень надежности элементной базы в США позволял системным и приборным фирмам не резервировать БЦВМ и другую аппаратуру (кроме аппаратуры для «Шаттлов» и ряда других КА). От нас же заказчик требовал иметь уровень надежности СУ выше, чем у американцев: уж очень высока была бы цена аварии, особенно для ракет с ядерными зарядами. И имея существенно уступающую по степени отработки американской элементную базу, мы вынуждены были использовать резервированные структуры (как правило, троированные), что увеличивало вес и габариты аппаратуры. Зато надежность СУ в полете получалась на достаточно высоком уровне. БЦВМ на основе процессора – М4М применялась в системе старта ракеты 11К25; на боковых блоках и в системе аварийной защиты (САЗ) – ЦВМ типа М4М; на выносном командном пункте – типа СМ2.
С конца 70-х годов начинается работа по созданию третьего поколения цифровых вычислительных комплексов на базе процессора М6, построенном на больших интегральных схемах (на БИСах) и микропроцессорных комплектах с увеличенным быстродействием и надежностью. Создание процессора М6 шло с большими трудностями, т.к. одновременно с разработкой процессора шла отработка элементной базы, создаваемой на предприятиях электронной промышленности. В машине широко использовались микропроцессорные сборки БИС. В ноябре 1979 года первый комплект БЦВМ М6 с лучшими характеристиками по сравнению с БЦВМ 15Л579 (быстродействие – 1 млн. операций в секунду, разрядность – 32, емкость ОЗУ – 16 Кб, емкость ПЗУ – 192 Кб) был передан на испытания. В 80-х годах был создан ряд центральных процессоров – М4М, М6М, М61, М7, которые стали основой для создания четвертого поколения многомашинных вычислительных комплексов. В конце 1982 года была завершена разработка процессора М6М, на основе которого построена БЦВМ для центрального блока РН 11К25 «Энергия». Надежность ее подтверждена при испытаниях двигателей блока Ц ракеты 11К25 и при первой попытке запуска ОК «Буран» 29 октября 1988 года. БЦВК М6М стоит на борту созданной в период 1983-1989 годов самой мощной в мире боевой ракеты Р-36М2 «Воевода» (SS-18 Mod. 5, Satan – по классификации США и NATO). На этой ракете удалось реализовать ряд принципиально новых идей: • индивидуальное высокоточное разведение боевых блоков; • «прямой» метод наведения, не требующий заранее подготовленного полетного задания; • дистанционное перенацеливание и др. В основе этих БЦВМ лежало использование бескорпусных интегральных схем и многослойных плат на полиамидной пленке. Это была чрезвычайно сложная и дорогостоящая технология. По ней изготавливались единичные комплекты (например, БЦВМ «Салют-5» для станции «Мир»). Вершиной работ КБЭ (ныне «Хартрон») в этом направлении стало создание комплекса автономного управления (КАУ) ракеты 11К25 «Энергия», которая «умерла», едва научившись летать. И тем не менее мы гордимся, гордимся заслуженно, этим творением наших рук, умов. И символично название «Энергия»: ведь столько энергии, сил, нервов вложили тысячи тогда еще советских людей в создание этого грандиозного по своим масштабам и возможностям ракетного комплекса. БЦВМ на базе процессора М4М были использованы в режиме непрерывной работы в течение всего срока боевого дежурства в наземной аппаратуре СУ Р-36М2 и крылатой ракеты «Метеорит», использовалась в составе СУ модулей орбитальной станции «Мир» (11Ф77 «Квант», 77КСД «Квант-2», 77КСТ «Кристалл», 77КСО «Спектр» и 77КСИ «Природа»). Работала и продолжает работать БЦВМ М4 в составе СУ модулей «Заря» и «Звезда» международной космической станции (МКС) «Альфа». На более чем 150 спутниках установлены те или иные системы на базе БЦВМ разработки ОКБ-692 / КБЭ (п/я А-7160) / НПО «Электроприбор» / ГПО «Хартрон» / АО «Хартрон». До 800 спутников запущено ракетами-носителями с системами управления разработки этого предприятия. Все, что здесь делалось, нужно было Советскому Союзу: системы управления и вычислительные комплексы для Р-36 всех модификаций, для ракеты-носителя 11К25 «Энергия», система раннего предупреждения ракетного удара противника и т. д. Украине это все стало ненужным...
|